
蟠螭紋 ばんちもん
龍が絡み合う紋様
蟠螭紋 ばんちもん
龍が絡み合う紋様
このサイトの情報より。
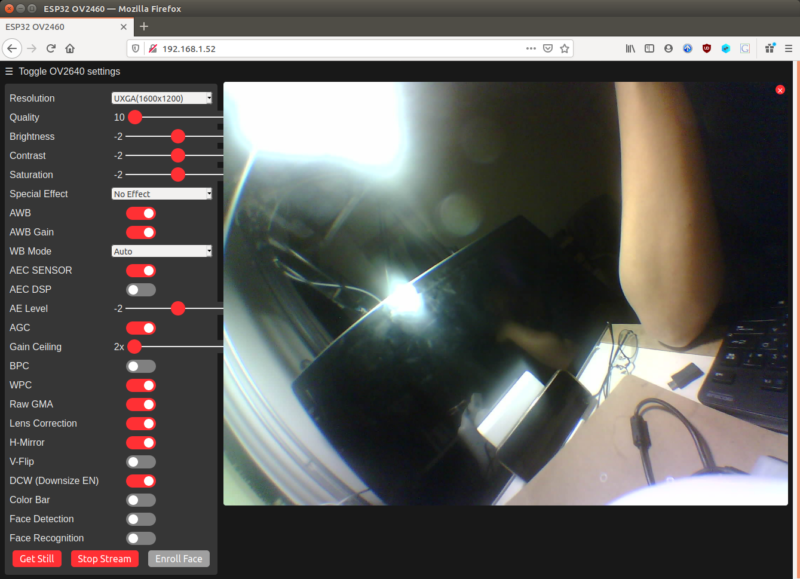
M5Camera のIPが 192.168.1.52 として、out フォルダ以下に jpg ファイルを連番で作成する場合は
ffmpeg -f mjpeg -i http://192.168.1.52:81/stream 'out/img%05d.jpg'
動画ファイルにするならば、mpg にするならば下記。
ffmpeg -f mjpeg -i http://192.168.1.52:81/stream ~/out.mpg
拡張子を変えればそのフォーマットで保存してくれる。out.avi なら aviフォーマット。
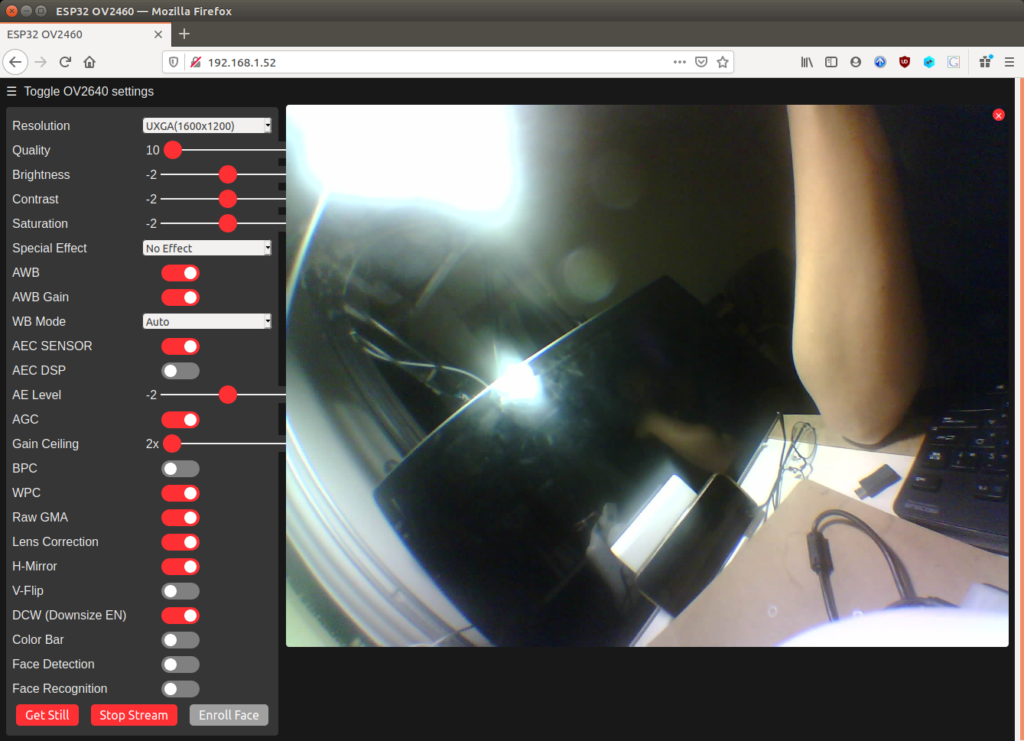
ただしM5Camera の画像サイズを大きくすると動画の再生時間がおかしくなる。 大きいほど stream が遅くなるため。だいたいVGA あたりからおかしくなる、かな。
暫定対策として、だいたいSXGA で 5-6fps程度のようなので、下記のように書いてテストし、5の値を上げたり下げたりである程度は対応可能。
ffmpeg -f mjpeg -r 5 -i http://192.168.1.52:81/stream -r 25 ~/out.mpg
しかし入力側のスピードが安定しないので、安定した解決はできない。

myCobotをROSで動かす。Jetson Nano上で作成したら、ROS動作が早くて良い。
以下覚書。
“ロボットアーム「myCobot」 をJetson Nano上のROSで動かす” の続きを読む
妻から、デジカメのSDカードを誤ってフォーマットしてしまったと相談。
MS純正のツールを利用して復元した備忘録。

Windows File Recovery をインストール。Windows Store から無償で入手可能。
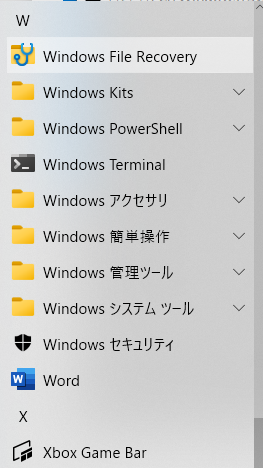
インストールしたら起動
AWS のオフィシャルブログに「Creating Object Recognition with Espressif ESP32」(Espressif ESP32 を使用したオブジェクト認識の作成)が10月に掲載された。
大変勉強になったが、そのままでは動かず、色々試してやっと動作。以下備忘録。
{
"Effect": "Allow",
"Action": "iot:Subscribe",
"Resource": "arn:aws:iot:REGION:ACCOUNT_ID:topicfilter/esp32/sub/+"
},# s3 = boto3.client('s3')
s3 = boto3.client('s3',config=Config(signature_version='s3v4'))rtc_gpio_desc' for ESP32 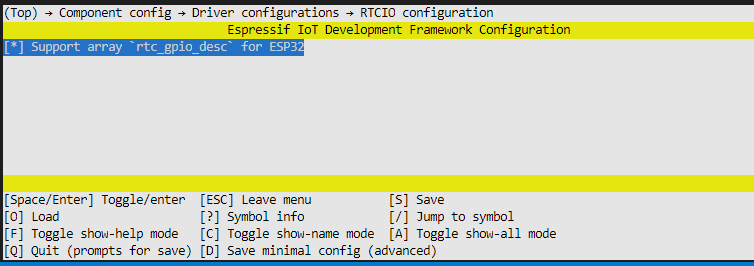
これで下記エラーが出なくなる。ここを参考にした。
“Amazonブログの「ESP32 でAWS IoT+Amazon Rekognition で動物と人を検知」を訂正した備忘録” の続きを読むnvcc は /usr/local/cuda/bin/nvcc
~$ /usr/local/cuda/bin/nvcc --version
nvcc: NVIDIA (R) Cuda compiler driver
Copyright (c) 2005-2019 NVIDIA Corporation
Built on Wed_Oct_23_21:14:42_PDT_2019
Cuda compilation tools, release 10.2, V10.2.89サンプルが /usr/local/bin/ 以下にいくつか
$ ls /usr/local/bin/
camera-capture detectnet-console.py images
camera-viewer detectnet.py my-detection.py
camera-viewer.py f2py my-recognition.py
convert-caffe2-to-onnx f2py3 networks
convert-onnx-to-caffe2 f2py3.6 pasteurize
cuda-examples.py futurize segnet
cuda-from-cv.py gl-display-test segnet-camera
cuda-from-numpy.py gl-display-test.py segnet-camera.py
cuda-to-cv.py imagenet segnet-console
cuda-to-numpy.py imagenet-camera segnet-console.py
detectnet imagenet-camera.py segnet.py
detectnet-camera imagenet-console segnet_utils.py
detectnet-camera.py imagenet-console.py video-viewer
detectnet-console imagenet.py video-viewer.py
tensorflow は入っていないが、container でGPU対応のV1.5とV2.2がある。
“jetson nano 覚書” の続きを読む
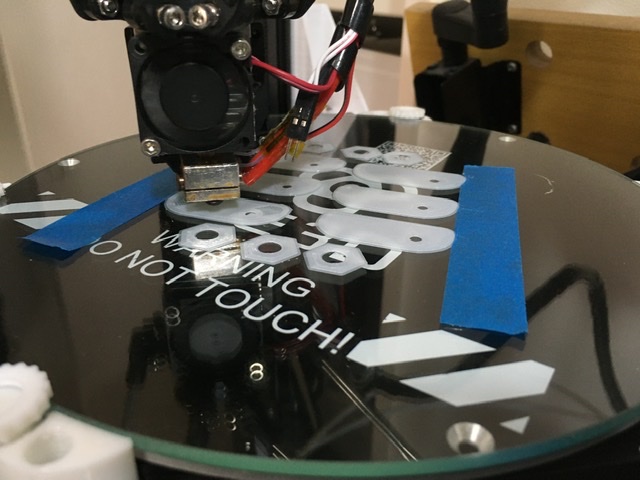
3Dプリンターのプリントを ラズベリーパイで制御させるため、OctoPrint を使ってます。
USB カメラを使ってストリーミング表示と保存をして、プリントの進捗確認や失敗時の原因確認に使っています。これの覚書。
ストリーミングはmjpg_streamer 利用。下記コマンドで実行。
mjpg_streamer -b -o "output_http.so -n" -i "input_uvc.so -f 1"
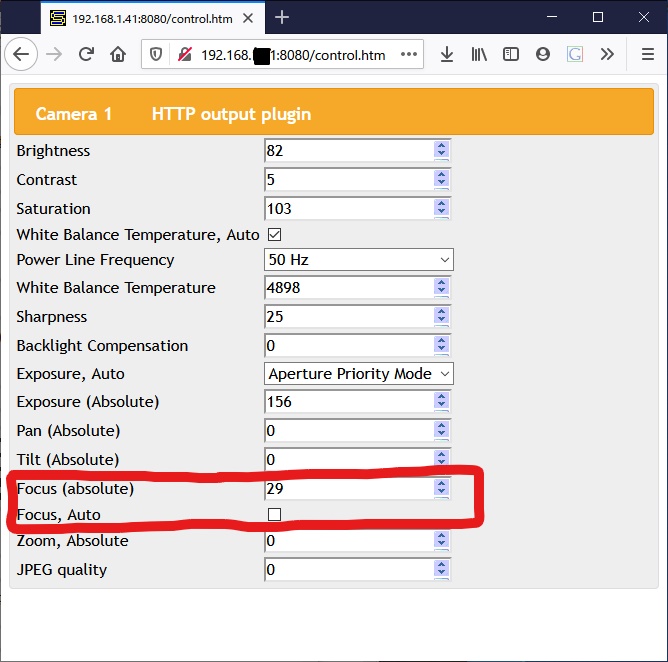
ただし、ピントがあわないのが悩みの種だった。プリントヘッドがあちこち動いてそのたびにAutofocusでピントが背景のほうにあってしまう。
mjpg_streamer の output_http.so ではサンプルでAutofocus無効にして手動focusが設定できる。サンプルは output_http.so のオプションとして -w でフォルダ指定して実行。
mjpg_streamer -i "input_uvc.so -f 1" -o "output_http.so -w /usr/local/share/mjpg-streamer/www/"
備忘録。delta型の3dプリンターのボードを32bitに交換した際の注意点。
| ボードの型番 | ベンダーの資料などから探して、 Configuration.h に記載。 今回は #define MOTHERBOARD BOARD_MKS_SGEN_L |
| プルーブ(ベットの自動レベリング用センサー) | #define FIX_MOUNTED_PROBE のあとで Z_MIN_PROBE_PIN に指定する。delta型ではメーカー設定をそのまま使えないことがある。Z_MIN_PIN が未指定だったり、Z_MAX_PINがZ_MIN_PROBE_PINに指定されたり。 今回は Marlin\src\pins\lpc1768\pins_MKS_SGEN_L.h にdefine Z_MIN_PROBE_PIN Z_MIN_PIN を追記。 M119 コマンドで結果確認。 |
| TMC2208 UARTチェック | #define X_DRIVER_TYPE TMC2208 と設定。 物理的にTMC2208接続横のUARTピンを有効にする。 M122コマンドで結果確認。 |
| delta設定 | delta の example configrationを利用するが、設定値は下記を注意。 FEEDRATE、ACCELERATION 、JERKはX,Y,Zとしてα柱、β柱、θ柱の設定を変更するため、Zの値に要注意。X,YとZを同じ値にしないと、θ柱のみ動きが微妙に変わる。 TMC2208利用時は Configuration_adv.h 中の #define Z_HYBRID_THRESHOLD をX,Yと同じにしておく必要あり。 |
HE3D K200(デルタ型 ヒートベッド 22cm円形 )のチューニング覚書。
| ヒートベッド固定 | 良。 付属のものはヒートベッドが動いてダメ。Kossel Adjustable Bed Clamp by stefel77(http://www.thingiverse.com/thing:1732494)が便利。ただしガラス板分の高さが足りないのを無理くりつけている。 |
| ヒートベッドにガラス板 | 大変良。 確実に平面になる。今回一番効果が高い。 |
| 自動レベリングは Delta Auto Calibration のみ | 良。 ガラス板+ ” Delta Auto Calibration”のみが一番調子よい模様。 ガラス板なしでもauto bed leveling は3pointのほうが調子が良い。 |
| AUTO_BED_LEVELING_UBL (MESH leveling) | × アルミのヒートベッドでは逆におかしくなる。 多分自動レベリングの押す力でベッドがたわんでしまうため。(特に中央寄りのポイント) ガラス板ならば Delta Auto Calibrationのみで充分。計算量も減るし。 |
| AUTO_BED_LEVELING_3POINT | × 上同様。 ガラス板ならば Delta Auto Calibrationのみで充分 。 アルミのみならばUBLよりは良い感じがしたが、正確には不明。 端のみで計測のためかと思うが、ガラス板買う方がよほど良い。 |
| Extruder交換 | 大変良。 吐出が安定しないので過去間違えて買った BIQU Universal Extruder Kit (SALEで送料無料だった) に交換したら安定した。努力があほらしくなったほど良い。買うなら right を買うべき。 leftだと逆だった。marlin 設定で方向逆にした。 |
| モータードライバ交換 | TMC2208に交換。大変静かで良い。 モードはメーカー推奨値に従って下記とした。 XYZは stealthChop まま、0.8V。Extruder用は spreadCycleに変更し電圧を0.9Vにしてファンもつけたが、多分0.8VままでOK(Extruder交換後戻していない) marlin設定では TMC2208_STANDALONE でreverseを true に。下記 Configuration.h参照。 |
| Marlinバージョンアップ 1.x → 2.0 | 多分1.xと変わらない。 設定ファイルは HE3Dのfacebookサイトからダウンロードしたものを修正。 |
| DELTA_SEGMENTS_PER_SECOND 100 | 100-150が妥当か。数字を大きくするには32bit化(というか高クロック化)した方がよさそう。 300とかにすると円盤プリントでプロセッサがほぼハング状態になり、時々動きが止まったりしてプリント結果も悪い。 10だと形が変になる。 |
| 速度などチューニング (ガラス板追加後) | プリントスピードは60mm/sec位までまあまあ良い。 accelは 3,000mm/s^2,jerkは 20mm/s^3。 移動速度はプリントスピードと同じにする。 初期レイヤーは 速度10-30mm/sec 、accelは 1,000 mm/s^2 , jerkは5-10mm/s^3。 |
| スプールホルダ | ホコリ除け+吸湿防止に。 ダイソーの 透明蓋付き収納ボックス を利用。穴開けてチューブ(3cm位)とワンタッチ接手をつけ、乾燥剤を入れた。 湿度は 概ね30%台で、防湿はOKかと。 |
LED Display: Control -> motion